.png)
Buy Unitree G1 — Humanoid Robots for Sale, Live Prices & Discounts

Humanoid Robots for Sale: The Unitree G1, Every Configuration Compared [July 2026]
If you're comparing the humanoid robots actually for sale in 2026, the Unitree G1 is where most research, education, and development buyers land — and this page compares every configuration in the lineup, from the $17,990 entertainment edition to the $73,900 flagship research build. Verified July pricing, direct US dealer checkout, exclusive discounts, and institutional procurement support. While the manufacturer's own store lists the G1 as backordered, authorized US dealers are taking orders now with verified lead times.
By the BotInfo.ai Research Team · Last updated: July 12, 2026
Unitree G1 EDU Standard (U1)
Full Python/C++/ROS2 SDK · Jetson Orin · the config most research labs actually need
Buy G1 EDU Standard → Compare All Models ↓Ships in 20–30 days · Exclusive discount applied via our checkout link
Availability & Lead Times
Last verified July 12, 2026 against dealer checkout and the July dealer price list. Quoted lead times assume order confirmation within one week.
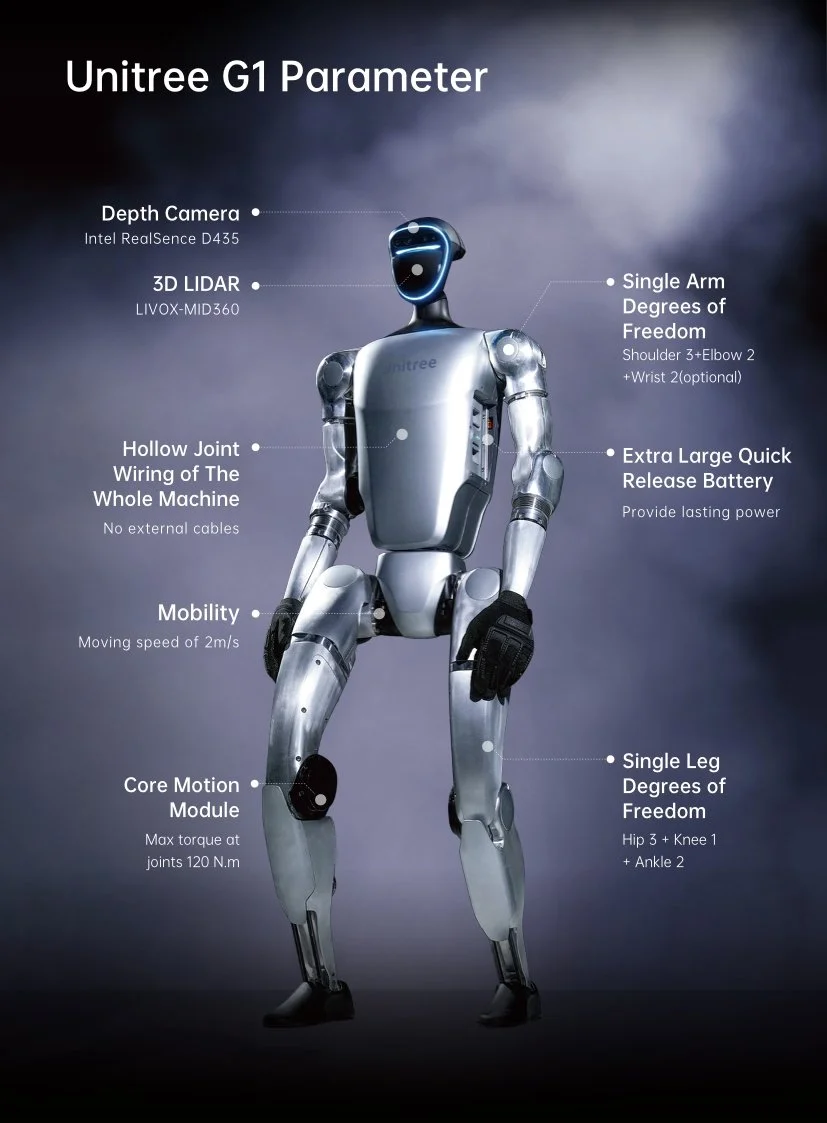
Unitree G1 — Quick Facts (July 2026)
Unitree G1 EDU Research Line — Verified July 2026 Pricing
Prices verified July 12, 2026 against authorized US dealer checkout and the July dealer price list. Buy buttons go straight to secure checkout with our exclusive discount pre-applied; the newest configurations route to a fast quote while dealer listings come online. EDU lead time: 20–30 days. On mobile, tap any configuration for full specs in the guide below.
| Configuration | Code | DOF | Hands | Price | |
|---|---|---|---|---|---|
| Base — SDK Entry | |||||
| G1 EDU Standard Recommended Full SDK · Jetson Orin |
U1 | 23 | Dummy | $43,900 | Buy |
| G1 EDU Plus +arm/waist mobility |
U2 | 29 | Dummy | $53,900 | Buy |
| Pro — Dexterous Manipulation, 27–37 DOF | |||||
| G1 EDU Pro G New Tendon-cable hands |
U14 | 27 | Tendon-cable | $45,900 | Get Quote |
| G1 EDU Pro E Best 5-finger value |
U11 | 35 | BrainCo 5-finger | $51,900 | Buy |
| G1 EDU Pro A Manipulation threshold |
U9 | 37 | Dex3-1 3-finger | $54,900 | Buy |
| G1 EDU Pro B 3-finger + tactile |
U10 | 37 | Dex3-1 + tactile | $56,900 | Buy |
| G1 EDU Pro F 5-finger + touch sensing |
U12 | 35 | BrainCo Touch 5-finger | $56,900 | Buy |
| Ultimate — Full Research Grade, 33–43 DOF | |||||
| G1 EDU Ultimate G New Tendon-cable, internal wiring, no haptics · 18-mo wty |
U13 | 33 | Tendon-cable | $55,900 | Get Quote |
| G1 EDU Ultimate E Value pick — 5-finger, 41 DOF · 18-mo wty |
U7 | 41 | BrainCo 5-finger | $63,900 | Buy |
| G1 EDU Ultimate A Force-controlled, max DOF |
U3 | 43 | Dex3-1 3-finger | $65,900 | Buy |
| G1 EDU Ultimate B Force + tactile, max DOF |
U4 | 43 | Dex3-1 + tactile | $67,900 | Buy |
| G1 EDU Ultimate C Inspire 5-finger dexterity |
U5 | 41 | Inspire 5-finger | $67,900 | Buy |
| G1 EDU Ultimate F 5-finger + touch, 41 DOF · 18-mo wty |
U8 | 41 | BrainCo Touch 5-finger | $67,900 | Buy |
| G1 EDU Ultimate D Max config — 17 tactile sensors |
U6 | 41 | Inspire + tactile | $73,900 | Buy |
Entertainment and events editions — G1 Basic, Pro, Comp, and the EDU Combat boxing build — are in the next section. The G1-D dual-arm line ($38,800–$66,300, fixed-base and wheeled configurations) has its own catalog — request a quote. Manufacturer direct pricing starts at $13,500 with shipping from China, currently backordered.
Entertainment & Events Editions
The lineup Unitree restructured in July 2026 for demos, venues, competitions, and combat-sport events. Basic ships from US dealer stock; the Pro, Comp, and Boxing editions route to a fast quote.
G1 Basic
The showpiece — demos, lobbies, STEM events- 23 DOF bipedal walking · 90 N·m knee
- 2 kg arm payload · pre-loaded routines
- No SDK · 8-month warranty
- Ships 7–15 days
G1 Pro
Performance edition — venues & showcases- 29 DOF (3-DOF waist, 7-DOF arms) · 120 N·m
- 3 kg arm payload · D435i + 128-line LiDAR
- UniStore: 10+ unlocked actions (dance, flips, kung-fu)
- 12-month warranty · no secondary development
G1-Comp
Competition & events — with dev access- 25 DOF · RealSense D455
- Includes Jetson Orin 100 TOPS dock
- Secondary development supported
- 1-year warranty, extendable for events
G1 EDU Combat (Boxing)
Robot boxing — built on the EDU Plus base- EDU Plus base + combat control system
- Reinforced waist motor (IM6010-R32)
- Armor kit, 2× gloves, helmet included
- 1–2 week delivery
Disclosure: No standard warranty — a $4,500 (¥30,000) repair subsidy is credited against repairs instead. An EDU Plus cannot be upgraded to Combat later, but a Combat unit functions as an EDU Plus.
Unitree G1 Price History
Tracked by the BotInfo.ai Research Team against dealer price lists and live listings.
G1 Accessories & Add-Ons — July 2026 Reference Pricing
- Two-hand remote controller — $370
- Spare battery (9,000 mAh) — $750
- Battery charger — $120
- Hoisting gantry — $850 (one gantry is included with every G1)
- MID360 LiDAR kit — $3,800 (rack, cable, and support included)
- Intel RealSense D435i — $1,200
- 2-DOF head module — $3,800
- AGX Orin compute dock — $7,600 (275 TOPS)
- AGX Thor compute dock — $15,200 (2,070 TOPS)
- Whole-body teleoperation kit — $15,000 (VR headset, dual motion trackers, integrated teleop software for dexterous manipulation and whole-body control)
Accessory pricing from the July 2026 dealer list. Include accessories in your quote request for bundled pricing — spare batteries and the LiDAR kit are the two most commonly under-budgeted lines; the teleoperation kit is the fastest path to imitation-learning data collection on the G1.
🔓 Unlock Exclusive G1 Discount Codes
BotInfo readers get negotiated discounts not shown at standard checkout. Reveal your codes below — then use the Buy buttons above (your flat discount is already applied via our links; stack the reveal code at checkout where eligible).
Our Role
BotInfo.ai is an independent robotics procurement gateway. We verify pricing across the authorized dealer network, negotiate reader discounts, and route your order to the checkout with the best current terms — the Buy buttons above go directly to secure dealer checkout with our discount applied. For institutional purchases (POs, NET-30, sole-source documentation, grant quotes), use the quote form at the bottom of this page. We may earn a referral fee on completed orders; it never changes your price.
Fleet and multi-unit procurement: Universities, research labs, and corporate R&D programs building humanoid fleets — whether five G1s or a mixed fleet across the G1, H2, and G1-D lines — can use the same quote form. BotInfo coordinates consolidated multi-unit pricing, staggered delivery schedules against your budget cycle, and the vendor documentation your purchasing office requires, across every platform we cover.
The Researcher's Guide to Choosing a Unitree G1
BotInfo Technical Analysis — Everything below goes beyond marketing specs. If you're writing a grant proposal, comparing platforms, or choosing a configuration for your lab, this is the section that matters.
Critical Decision: G1 Basic vs. G1 EDU
Buy the wrong one and you cannot upgrade later. The Basic is a demonstration unit only.
| Capability | G1 Basic ($17,990) | G1 EDU ($43,900+) |
|---|---|---|
| SDK / Programming | ✕ None | ✓ Python, C++, ROS2 |
| UnifoLM-VLA-0 | ✕ Cannot deploy | ✓ 12 task categories |
| Sim-to-Real | ✕ Not possible | ✓ Isaac Sim, MuJoCo |
| DOF | 23 — locomotion only | 23–43 — full manipulation |
| Hands | Fixed grippers | 3-finger, 5-finger + tactile, or tendon-cable |
| Compute | Basic CPU (no GPU) | Jetson Orin, up to 100 TOPS |
| Who Should Buy | Marketing, museums, STEM events | Research labs, universities, R&D teams |
Decoding the U-Codes: U1 Through U14
Unitree's internal configuration codes appear on quotes, invoices, and dealer listings — and they don't sort intuitively. U1–U2 are the SDK base tiers (EDU Standard and Plus). U3–U6 are the original Ultimate line (A through D). U7–U8 are the newer Ultimate E and F with BrainCo 5-finger hands. U9–U12 are the Pro line (A, B, E, F). The newest additions, U13 and U14, are the tendon-cable-hand configurations announced in July 2026: Ultimate G (U13, 33 DOF, internal wiring, no haptics, 18-month warranty) and Pro G (U14, 27 DOF). If a quote references "G1 EDU U5," that's the Ultimate C with Inspire 5-finger hands at $67,900. The full mapping with live pricing is in the configuration table above.
Degrees of Freedom: What 23 vs. 43 Actually Means
| DOF | Tier | Enables | Research Applications |
|---|---|---|---|
| 23 | Basic / EDU Std (U1) | Bipedal walking, basic arms | Gait analysis, balance, basic HRI |
| 27–29 | EDU Plus (U2) / Pro G (U14) | +arm/waist mobility, tendon-cable option | Mobile manipulation, warehouse pick |
| 33–37 | Pro A/B/E/F (U9–U12) / Ultimate G (U13) | Dexterous hands — manipulation threshold | Grasp planning, tactile, UnifoLM tasks |
| 41–43 | Ultimate A–F (U3–U8) | Force-controlled / 5-finger + tactile | Precision assembly, imitation learning |
Grant writing note: If your proposal mentions "dexterous manipulation" or "grasping," budget for Pro minimum ($51,900+).
Battery: Marketing vs. Lab Reality
Lab tip: Budget 1–1.25 hrs active per charge. Charges in ~1.5 hrs. Full-day sessions need 3–4 cycles.
UnifoLM-VLA-0: Manipulation Foundation Model
Released March 16, 2026. Open-source on GitHub. Built on Qwen2.5-VL-7B. Provides a deployable manipulation baseline — no weeks of policy training required. Minimum platform: EDU Standard ($43,900). Best: Pro/Ultimate with 100 TOPS and dexterous hands.
What it doesn't do: Navigation, room planning, task sequencing, or dialogue. It's a manipulation foundation — you build your research on top of it.
SDK & Developer Ecosystem
The G1 EDU runs unitree_sdk2 with full Python and C++ bindings, a maintained unitree_ros2 package for ROS2 Humble/Iron, official URDF for NVIDIA Isaac Sim, and MuJoCo XML models for contact-rich simulation and RL training. The typical research workflow: train policies in Isaac Sim or MuJoCo → domain randomization → deploy to the Jetson Orin via unitree_sdk2 → refine with real-world data collected through VR teleoperation for imitation learning. 30+ published papers used the G1 in 2025 across locomotion, manipulation, and HRI; MIT, Stanford, CMU, ETH Zurich, and Tsinghua (whose LATENT framework got a G1 playing table tennis) run G1 EDU platforms.
Safety & Lab Compatibility
At 35 kg and 2 m/s, collision kinetic energy is ~70 J vs ~160 J for an 80 kg humanoid. Manageable by one person. Fits standard doorways. No reinforced flooring needed. BotInfo provides risk assessment templates for safety committee review.
G1 vs. R1: Which Unitree Humanoid?
Unitree's R1 (from $6,870) is the budget entry into humanoids; the G1 is the step up for serious research.
| Unitree R1 | Unitree G1 | |
|---|---|---|
| Price | $6,870–$32,900 | $17,990–$73,900 |
| Size | 121 cm / 25 kg | 127 cm / 35 kg |
| DOF | 20–40 | 23–43 |
| Sensors | Camera-based (model dependent) | 3D LiDAR + depth camera |
| Payload | Light-duty | 3 kg per arm (EDU) |
| Best for | Budget labs, teaching, first humanoid | Funded research, manipulation, publications |
Choose the R1 if your budget caps under $20K; choose the G1 EDU if your work needs LiDAR, payload, the mature SDK ecosystem, or citation-backed research lineage. Full breakdown on our Unitree R1 page.
Configuration Guide by Use Case
| Use Case | Key Need | Config | Budget |
|---|---|---|---|
| STEM Demos | Walking, no code | Basic | $17,990 |
| Events & Venues | Unlocked action library | Pro / Comp | $27,990–$48,900 |
| Intro Robotics Lab | SDK, locomotion | EDU Standard (U1) | $43,900 |
| Mobile Manipulation | Arm workspace | EDU Plus (U2) | $53,900 |
| Tendon-Cable Hands | Cable-driven dexterity | Pro G (U14) / Ultimate G (U13) | $45,900–$55,900 |
| Grasping / UnifoLM | Hands + 100 TOPS | Pro A or B (U9/U10) | $54,900–$56,900 |
| HRI / Social | Human-like hands | Pro E or F (U11/U12) | $51,900–$56,900 |
| Force Assembly | Force control | Ultimate A/B (U3/U4) | $65,900–$67,900 |
| Tactile Research | Max sensors | Ultimate D (U6) | $73,900 |
| Imitation Learning | 5-finger value | Ultimate E (U7) | $63,900 |
| Full-Size Locomotion | Human-scale agility | H1 (legacy — end of life March 2026; see H2) | Quote |
Unitree G1 in 2026 — What's New (July Update)
Unitree IPO Registration Approved — Listing Imminent
China's securities regulator approved Unitree's IPO registration for Shanghai's STAR Market, clearing the final formal hurdle. The company plans to raise roughly 4.2 billion yuan (~$618M) at an implied valuation near 42 billion yuan, with a potential debut as early as late July. The June 1 listing-committee clearance was the fastest in the exchange's pre-review era, and Unitree becomes mainland China's first major humanoid robotics listing. For buyers, the IPO capital is earmarked for R&D and manufacturing capacity — supporting long-term parts and support availability for the G1 platform.
July 2026 Lineup Restructure: Entertainment Editions and Tendon-Cable Hands
Unitree restructured the G1 range: the Pro ($27,990), Comp ($48,900), and EDU Combat boxing ($63,900) editions now anchor a dedicated entertainment-and-events tier, while two tendon-cable-hand research configurations — Ultimate G (U13, $55,900) and Pro G (U14, $45,900) — join the EDU line. Both tendon-cable configs and the entertainment editions are covered in the pricing sections above, with quote routing where dealer listings are still coming online.
G1 Basic Price Drops to $17,990 at US Dealers
The G1 Basic now checks out at $17,990 through US dealer channels, down from the $21,500 that held through 2025 — a $3,510 cut. Manufacturer-direct pricing sits at $13,500 with shipping from China, but Unitree's own store currently lists the G1 as backordered, making US dealer stock the fastest path to delivery. EDU pricing ($43,900–$73,900) is unchanged.
NVIDIA Names Unitree Hardware for Open GR00T Humanoid Platform
NVIDIA selected Unitree's H2 Plus body as the hardware foundation for its open GR00T Reference Humanoid Robot platform. While the reference design uses the larger H2, the endorsement anchors Unitree's whole ecosystem — including the G1's Jetson Orin compute and Isaac Sim toolchain — deeper into NVIDIA's robotics stack.
G1-D Dual-Arm Line Now Orderable
The G1-D — the dual-arm variant announced in April — is now orderable through dealer channels in ten configurations from $38,800 to $66,300, keeping the G1's manipulation stack on a lifting-column base: fixed-station in the Standard configurations and wheeled-chassis in the Ultimates, for data collection and environments where bipedal locomotion isn't needed. Request a G1-D quote →
G1 Still Working the Floor at Tokyo Haneda Airport
The G1 remains deployed for baggage and cargo handling at Tokyo Haneda Airport in partnership with Japan Airlines and GMO Internet Group — the first commercial airport deployment of a humanoid robot anywhere. Trial operations run through 2028 with ongoing evaluation of autonomous logistics workflows, giving institutional buyers a rare public reference deployment for the platform.
BotInfo Field Notes — Hands-On G1 Observations
Candid operator observations from the BotInfo.ai research team. Based on multiple in-person sessions with the Unitree G1 Basic at an authorized dealer's office and outdoor facility — not a sponsored review.
First Impression: Watching It Stand Up
The first time I saw a G1 in person was at a dealer investor event. It was lying flat on the floor — powered off, motionless. The demo engineer flipped the power switch on its side, and within about two minutes, the G1 came to life. It arched upward from the floor, legs pressing against the ground, knees straightening, torso curling up, head following last — a smooth, unfolding motion that looked straight out of a sci-fi film. I remember saying out loud, "Frankenstein coming to life!" The room was buzzing, but that wake-up sequence genuinely made people stop and watch.
Standing next to it, the G1 is about 4 feet tall — the size of a human child. The photos and videos don't convey that well. You expect a humanoid robot to be imposing; the G1 is actually approachable. You could put this in a university lobby or a conference booth and people would walk up to it, not away from it.
The Macarena: What "Pre-Trained Policies" Actually Look Like
At that same event, the engineer stood behind the G1, grabbed both arms by the biceps, and physically moved them through the Macarena arm pattern a few times — essentially puppeting it to reinforce the pre-programmed dance policy. Then he switched to the remote control and triggered the routine. The G1 started rotating its torso left and right, extending and curling its arms through the upper-body dance moves. I danced alongside it while the sales team recorded us and the crowd cheered.
Here's what I noticed: the dance was upper body only. No leg movements, no footwork, no hip rotation — just torso and arms. The robot I was dancing with was a Basic model (no SDK), running a pre-loaded policy that Unitree ships via cloud updates. And even that limited routine had to be physically demonstrated to it first by the engineer before it would perform reliably.
The Parking Lot: What Happened When It Ran
A few weeks later, I visited the same dealer's office on a Saturday morning. A marketing team member walked the G1 outside, crossed the street to the sidewalk with the remote control, and commanded it to run toward me. It started jogging — and then veered left, stepping off the sidewalk into the dirt shoulder between the walkway and the parking lot. No collision, but it clearly couldn't maintain a straight line.
She reset it, and we tried again — this time jogging together in the parking lot. After about 15 yards, the G1 veered left again and ran into me. It wasn't a hard hit — I played it off on camera by stopping, catching my breath, and asking it if it wanted to keep going. She commanded it to raise its right arm in a "come on!" wave gesture, and we continued. It made for a fun video moment, but the takeaway was clear: the G1's autonomous locomotion, even on flat pavement, drifts noticeably. It doesn't track straight lines reliably without correction.
What the Spec Sheet Doesn't Tell You
After spending time with the G1 across multiple sessions, here's what I'd want any buyer to know — especially if you're writing a purchase justification or grant proposal:
The marketing videos are aspirational, not operational. The backflips, martial arts sequences, and complex dance routines you see on Unitree's social media are produced under controlled lab conditions with specialized firmware and extensive data training. They do not represent out-of-the-box capabilities for any G1 you can buy today. The dealer's sales team confirmed this directly — those videos are pre-recorded marketing productions.
The Basic model is a demo unit, full stop. No programming, no custom policies, no SDK. It walks, it does pre-loaded gestures, and that's it. If your use case involves anything beyond showing it to people, you need an EDU configuration at minimum.
Locomotion drifts on flat ground. Even on smooth pavement, the G1 doesn't maintain a perfectly straight trajectory. For lab use with defined paths or tethered operation, this is manageable. For any application requiring precise autonomous navigation, you'll need to build that layer yourself on the EDU SDK.
It's genuinely impressive up close anyway. Despite all the caveats, watching a bipedal robot that costs less than a used car stand itself up from the floor, jog across a parking lot, and wave at you is still remarkable. The hardware quality is real. The potential is real. Just calibrate your expectations against the marketing.
More candid behind-the-scenes content with the G1 on the BotInfo YouTube channel →
Who Should Buy the Unitree G1?
Buy the G1 Basic ($17,990) if you:
- ✓ Want a humanoid robot for demonstrations, exhibitions, trade shows, or marketing displays
- ✓ Need a visually impressive showpiece for a robotics lab, showroom, or corporate lobby
- ✓ Are evaluating whether humanoid robots fit your organization's future plans
- ✓ Have no need for SDK access or custom programming
Buy the G1 EDU (any configuration, $43,900+) if you:
- ✓ Are a university, research institution, or corporate R&D team studying humanoid locomotion, manipulation, or embodied AI
- ✓ Need to develop and deploy custom AI models on real humanoid hardware
- ✓ Require SDK access, ROS2 integration, Isaac Sim or MuJoCo simulation pipelines, and full sensor data streaming
- ✓ Are writing a grant proposal mentioning "dexterous manipulation" or "grasping" (budget for Pro minimum at $51,900+)
- ✓ Need UnifoLM-VLA-0 deployment capability
Don't buy a G1 if you:
- ✕ Need a robot for sustained physical labor or heavy industrial tasks (2–3 kg arm payload limits this)
- ✕ Require outdoor all-terrain operation or weather resistance (no IP rating; indoor use recommended)
- ✕ Need a robot that can work at standard human workbench/counter heights (127 cm height limits practical task reach)
- ✕ Expect human-level dexterity and full autonomy today
- ✕ Are in a jurisdiction with restrictions on Chinese robotics imports
Before you lock your budget: the G1's real cost
A quoted humanoid robot can reach 2.5×–2.7× its sticker price once import duty, federal entry fees, freight, customs brokerage, engineer integration time, compute, spare batteries and multi-year maintenance are counted. Most institutional budgets miss these lines — and the gap routinely exceeds the price of the robot itself.
The BotInfo Humanoid Robot TCO Calculator turns any robot quote into a defensible landed cost, Year 1 total and 3-year total cost of ownership.
- ✓ Every cost line institutional buyers forget — pre-built with researched 2026 figures
- ✓ The engineer-integration line industry insiders call "the cost nobody writes down"
- ✓ A guided import-duty section — how to find your real HTS code and Section 301 rate
- ✓ Low / likely / high scenario tab so you can budget a defensible range
- ✓ Works for any humanoid robot — swap in your own quote and it recalculates instantly
Excel / Google Sheets compatible. A budgeting aid, not customs, legal or financial advice — verify figures with a licensed customs broker.
Frequently Asked Questions
How much does the Unitree G1 cost in 2026?
What's the best humanoid robot to buy in 2026?
Where can I buy a Unitree G1 right now?
Is the Unitree G1 in stock?
How should I plan lead times against a budget cycle?
What's the difference between G1 Basic and G1 EDU?
Which G1 EDU configuration should I buy?
What do the U-codes (U1–U14) mean?
Can I get a discount on the Unitree G1?
Can I get NET-30 terms or pay by purchase order?
Can I buy a G1 internationally?
Should I buy the G1 or the cheaper Unitree R1?
What is the Unitree G1-D?
Is Unitree financially stable?
Ordering Multiple Units or Need PO Billing?
For volume orders, purchase orders, NET-30 terms, sole-source documentation, quotes on the Pro / Comp / Boxing editions or the new tendon-cable configs, G1-D quotes, or international landed-cost estimates — BotInfo responds within 24 hours.
Buy Unitree G1 — Humanoid Robots for Sale, Live Prices & Discounts
Humanoid Robots for Sale: The Unitree G1, Every Configuration Compared [July 2026]
If you're comparing the humanoid robots actually for sale in 2026, the Unitree G1 is where most research, education, and development buyers land — and this page compares every configuration in the lineup, from the $17,990 entertainment edition to the $73,900 flagship research build. Verified July pricing, direct US dealer checkout, exclusive discounts, and institutional procurement support. While the manufacturer's own store lists the G1 as backordered, authorized US dealers are taking orders now with verified lead times.
By the BotInfo.ai Research Team · Last updated: July 12, 2026
Unitree G1 EDU Standard (U1)
Full Python/C++/ROS2 SDK · Jetson Orin · the config most research labs actually need
Buy G1 EDU Standard → Compare All Models ↓Ships in 20–30 days · Exclusive discount applied via our checkout link
Availability & Lead Times
Last verified July 12, 2026 against dealer checkout and the July dealer price list. Quoted lead times assume order confirmation within one week.
Unitree G1 — Quick Facts (July 2026)
Unitree G1 EDU Research Line — Verified July 2026 Pricing
Prices verified July 12, 2026 against authorized US dealer checkout and the July dealer price list. Buy buttons go straight to secure checkout with our exclusive discount pre-applied; the newest configurations route to a fast quote while dealer listings come online. EDU lead time: 20–30 days. On mobile, tap any configuration for full specs in the guide below.
| Configuration | Code | DOF | Hands | Price | |
|---|---|---|---|---|---|
| Base — SDK Entry | |||||
| G1 EDU Standard Recommended Full SDK · Jetson Orin |
U1 | 23 | Dummy | $43,900 | Buy |
| G1 EDU Plus +arm/waist mobility |
U2 | 29 | Dummy | $53,900 | Buy |
| Pro — Dexterous Manipulation, 27–37 DOF | |||||
| G1 EDU Pro G New Tendon-cable hands |
U14 | 27 | Tendon-cable | $45,900 | Get Quote |
| G1 EDU Pro E Best 5-finger value |
U11 | 35 | BrainCo 5-finger | $51,900 | Buy |
| G1 EDU Pro A Manipulation threshold |
U9 | 37 | Dex3-1 3-finger | $54,900 | Buy |
| G1 EDU Pro B 3-finger + tactile |
U10 | 37 | Dex3-1 + tactile | $56,900 | Buy |
| G1 EDU Pro F 5-finger + touch sensing |
U12 | 35 | BrainCo Touch 5-finger | $56,900 | Buy |
| Ultimate — Full Research Grade, 33–43 DOF | |||||
| G1 EDU Ultimate G New Tendon-cable, internal wiring, no haptics · 18-mo wty |
U13 | 33 | Tendon-cable | $55,900 | Get Quote |
| G1 EDU Ultimate E Value pick — 5-finger, 41 DOF · 18-mo wty |
U7 | 41 | BrainCo 5-finger | $63,900 | Buy |
| G1 EDU Ultimate A Force-controlled, max DOF |
U3 | 43 | Dex3-1 3-finger | $65,900 | Buy |
| G1 EDU Ultimate B Force + tactile, max DOF |
U4 | 43 | Dex3-1 + tactile | $67,900 | Buy |
| G1 EDU Ultimate C Inspire 5-finger dexterity |
U5 | 41 | Inspire 5-finger | $67,900 | Buy |
| G1 EDU Ultimate F 5-finger + touch, 41 DOF · 18-mo wty |
U8 | 41 | BrainCo Touch 5-finger | $67,900 | Buy |
| G1 EDU Ultimate D Max config — 17 tactile sensors |
U6 | 41 | Inspire + tactile | $73,900 | Buy |
Entertainment and events editions — G1 Basic, Pro, Comp, and the EDU Combat boxing build — are in the next section. The G1-D dual-arm line ($38,800–$66,300, fixed-base and wheeled configurations) has its own catalog — request a quote. Manufacturer direct pricing starts at $13,500 with shipping from China, currently backordered.
Entertainment & Events Editions
The lineup Unitree restructured in July 2026 for demos, venues, competitions, and combat-sport events. Basic ships from US dealer stock; the Pro, Comp, and Boxing editions route to a fast quote.
G1 Basic
The showpiece — demos, lobbies, STEM events- 23 DOF bipedal walking · 90 N·m knee
- 2 kg arm payload · pre-loaded routines
- No SDK · 8-month warranty
- Ships 7–15 days
G1 Pro
Performance edition — venues & showcases- 29 DOF (3-DOF waist, 7-DOF arms) · 120 N·m
- 3 kg arm payload · D435i + 128-line LiDAR
- UniStore: 10+ unlocked actions (dance, flips, kung-fu)
- 12-month warranty · no secondary development
G1-Comp
Competition & events — with dev access- 25 DOF · RealSense D455
- Includes Jetson Orin 100 TOPS dock
- Secondary development supported
- 1-year warranty, extendable for events
G1 EDU Combat (Boxing)
Robot boxing — built on the EDU Plus base- EDU Plus base + combat control system
- Reinforced waist motor (IM6010-R32)
- Armor kit, 2× gloves, helmet included
- 1–2 week delivery
Disclosure: No standard warranty — a $4,500 (¥30,000) repair subsidy is credited against repairs instead. An EDU Plus cannot be upgraded to Combat later, but a Combat unit functions as an EDU Plus.
Unitree G1 Price History
Tracked by the BotInfo.ai Research Team against dealer price lists and live listings.
G1 Accessories & Add-Ons — July 2026 Reference Pricing
- Two-hand remote controller — $370
- Spare battery (9,000 mAh) — $750
- Battery charger — $120
- Hoisting gantry — $850 (one gantry is included with every G1)
- MID360 LiDAR kit — $3,800 (rack, cable, and support included)
- Intel RealSense D435i — $1,200
- 2-DOF head module — $3,800
- AGX Orin compute dock — $7,600 (275 TOPS)
- AGX Thor compute dock — $15,200 (2,070 TOPS)
- Whole-body teleoperation kit — $15,000 (VR headset, dual motion trackers, integrated teleop software for dexterous manipulation and whole-body control)
Accessory pricing from the July 2026 dealer list. Include accessories in your quote request for bundled pricing — spare batteries and the LiDAR kit are the two most commonly under-budgeted lines; the teleoperation kit is the fastest path to imitation-learning data collection on the G1.
🔓 Unlock Exclusive G1 Discount Codes
BotInfo readers get negotiated discounts not shown at standard checkout. Reveal your codes below — then use the Buy buttons above (your flat discount is already applied via our links; stack the reveal code at checkout where eligible).
Our Role
BotInfo.ai is an independent robotics procurement gateway. We verify pricing across the authorized dealer network, negotiate reader discounts, and route your order to the checkout with the best current terms — the Buy buttons above go directly to secure dealer checkout with our discount applied. For institutional purchases (POs, NET-30, sole-source documentation, grant quotes), use the quote form at the bottom of this page. We may earn a referral fee on completed orders; it never changes your price.
Fleet and multi-unit procurement: Universities, research labs, and corporate R&D programs building humanoid fleets — whether five G1s or a mixed fleet across the G1, H2, and G1-D lines — can use the same quote form. BotInfo coordinates consolidated multi-unit pricing, staggered delivery schedules against your budget cycle, and the vendor documentation your purchasing office requires, across every platform we cover.
The Researcher's Guide to Choosing a Unitree G1
BotInfo Technical Analysis — Everything below goes beyond marketing specs. If you're writing a grant proposal, comparing platforms, or choosing a configuration for your lab, this is the section that matters.
Critical Decision: G1 Basic vs. G1 EDU
Buy the wrong one and you cannot upgrade later. The Basic is a demonstration unit only.
| Capability | G1 Basic ($17,990) | G1 EDU ($43,900+) |
|---|---|---|
| SDK / Programming | ✕ None | ✓ Python, C++, ROS2 |
| UnifoLM-VLA-0 | ✕ Cannot deploy | ✓ 12 task categories |
| Sim-to-Real | ✕ Not possible | ✓ Isaac Sim, MuJoCo |
| DOF | 23 — locomotion only | 23–43 — full manipulation |
| Hands | Fixed grippers | 3-finger, 5-finger + tactile, or tendon-cable |
| Compute | Basic CPU (no GPU) | Jetson Orin, up to 100 TOPS |
| Who Should Buy | Marketing, museums, STEM events | Research labs, universities, R&D teams |
Decoding the U-Codes: U1 Through U14
Unitree's internal configuration codes appear on quotes, invoices, and dealer listings — and they don't sort intuitively. U1–U2 are the SDK base tiers (EDU Standard and Plus). U3–U6 are the original Ultimate line (A through D). U7–U8 are the newer Ultimate E and F with BrainCo 5-finger hands. U9–U12 are the Pro line (A, B, E, F). The newest additions, U13 and U14, are the tendon-cable-hand configurations announced in July 2026: Ultimate G (U13, 33 DOF, internal wiring, no haptics, 18-month warranty) and Pro G (U14, 27 DOF). If a quote references "G1 EDU U5," that's the Ultimate C with Inspire 5-finger hands at $67,900. The full mapping with live pricing is in the configuration table above.
Degrees of Freedom: What 23 vs. 43 Actually Means
| DOF | Tier | Enables | Research Applications |
|---|---|---|---|
| 23 | Basic / EDU Std (U1) | Bipedal walking, basic arms | Gait analysis, balance, basic HRI |
| 27–29 | EDU Plus (U2) / Pro G (U14) | +arm/waist mobility, tendon-cable option | Mobile manipulation, warehouse pick |
| 33–37 | Pro A/B/E/F (U9–U12) / Ultimate G (U13) | Dexterous hands — manipulation threshold | Grasp planning, tactile, UnifoLM tasks |
| 41–43 | Ultimate A–F (U3–U8) | Force-controlled / 5-finger + tactile | Precision assembly, imitation learning |
Grant writing note: If your proposal mentions "dexterous manipulation" or "grasping," budget for Pro minimum ($51,900+).
Battery: Marketing vs. Lab Reality
Lab tip: Budget 1–1.25 hrs active per charge. Charges in ~1.5 hrs. Full-day sessions need 3–4 cycles.
UnifoLM-VLA-0: Manipulation Foundation Model
Released March 16, 2026. Open-source on GitHub. Built on Qwen2.5-VL-7B. Provides a deployable manipulation baseline — no weeks of policy training required. Minimum platform: EDU Standard ($43,900). Best: Pro/Ultimate with 100 TOPS and dexterous hands.
What it doesn't do: Navigation, room planning, task sequencing, or dialogue. It's a manipulation foundation — you build your research on top of it.
SDK & Developer Ecosystem
The G1 EDU runs unitree_sdk2 with full Python and C++ bindings, a maintained unitree_ros2 package for ROS2 Humble/Iron, official URDF for NVIDIA Isaac Sim, and MuJoCo XML models for contact-rich simulation and RL training. The typical research workflow: train policies in Isaac Sim or MuJoCo → domain randomization → deploy to the Jetson Orin via unitree_sdk2 → refine with real-world data collected through VR teleoperation for imitation learning. 30+ published papers used the G1 in 2025 across locomotion, manipulation, and HRI; MIT, Stanford, CMU, ETH Zurich, and Tsinghua (whose LATENT framework got a G1 playing table tennis) run G1 EDU platforms.
Safety & Lab Compatibility
At 35 kg and 2 m/s, collision kinetic energy is ~70 J vs ~160 J for an 80 kg humanoid. Manageable by one person. Fits standard doorways. No reinforced flooring needed. BotInfo provides risk assessment templates for safety committee review.
G1 vs. R1: Which Unitree Humanoid?
Unitree's R1 (from $6,870) is the budget entry into humanoids; the G1 is the step up for serious research.
| Unitree R1 | Unitree G1 | |
|---|---|---|
| Price | $6,870–$32,900 | $17,990–$73,900 |
| Size | 121 cm / 25 kg | 127 cm / 35 kg |
| DOF | 20–40 | 23–43 |
| Sensors | Camera-based (model dependent) | 3D LiDAR + depth camera |
| Payload | Light-duty | 3 kg per arm (EDU) |
| Best for | Budget labs, teaching, first humanoid | Funded research, manipulation, publications |
Choose the R1 if your budget caps under $20K; choose the G1 EDU if your work needs LiDAR, payload, the mature SDK ecosystem, or citation-backed research lineage. Full breakdown on our Unitree R1 page.
Configuration Guide by Use Case
| Use Case | Key Need | Config | Budget |
|---|---|---|---|
| STEM Demos | Walking, no code | Basic | $17,990 |
| Events & Venues | Unlocked action library | Pro / Comp | $27,990–$48,900 |
| Intro Robotics Lab | SDK, locomotion | EDU Standard (U1) | $43,900 |
| Mobile Manipulation | Arm workspace | EDU Plus (U2) | $53,900 |
| Tendon-Cable Hands | Cable-driven dexterity | Pro G (U14) / Ultimate G (U13) | $45,900–$55,900 |
| Grasping / UnifoLM | Hands + 100 TOPS | Pro A or B (U9/U10) | $54,900–$56,900 |
| HRI / Social | Human-like hands | Pro E or F (U11/U12) | $51,900–$56,900 |
| Force Assembly | Force control | Ultimate A/B (U3/U4) | $65,900–$67,900 |
| Tactile Research | Max sensors | Ultimate D (U6) | $73,900 |
| Imitation Learning | 5-finger value | Ultimate E (U7) | $63,900 |
| Full-Size Locomotion | Human-scale agility | H1 (legacy — end of life March 2026; see H2) | Quote |
Unitree G1 in 2026 — What's New (July Update)
Unitree IPO Registration Approved — Listing Imminent
China's securities regulator approved Unitree's IPO registration for Shanghai's STAR Market, clearing the final formal hurdle. The company plans to raise roughly 4.2 billion yuan (~$618M) at an implied valuation near 42 billion yuan, with a potential debut as early as late July. The June 1 listing-committee clearance was the fastest in the exchange's pre-review era, and Unitree becomes mainland China's first major humanoid robotics listing. For buyers, the IPO capital is earmarked for R&D and manufacturing capacity — supporting long-term parts and support availability for the G1 platform.
July 2026 Lineup Restructure: Entertainment Editions and Tendon-Cable Hands
Unitree restructured the G1 range: the Pro ($27,990), Comp ($48,900), and EDU Combat boxing ($63,900) editions now anchor a dedicated entertainment-and-events tier, while two tendon-cable-hand research configurations — Ultimate G (U13, $55,900) and Pro G (U14, $45,900) — join the EDU line. Both tendon-cable configs and the entertainment editions are covered in the pricing sections above, with quote routing where dealer listings are still coming online.
G1 Basic Price Drops to $17,990 at US Dealers
The G1 Basic now checks out at $17,990 through US dealer channels, down from the $21,500 that held through 2025 — a $3,510 cut. Manufacturer-direct pricing sits at $13,500 with shipping from China, but Unitree's own store currently lists the G1 as backordered, making US dealer stock the fastest path to delivery. EDU pricing ($43,900–$73,900) is unchanged.
NVIDIA Names Unitree Hardware for Open GR00T Humanoid Platform
NVIDIA selected Unitree's H2 Plus body as the hardware foundation for its open GR00T Reference Humanoid Robot platform. While the reference design uses the larger H2, the endorsement anchors Unitree's whole ecosystem — including the G1's Jetson Orin compute and Isaac Sim toolchain — deeper into NVIDIA's robotics stack.
G1-D Dual-Arm Line Now Orderable
The G1-D — the dual-arm variant announced in April — is now orderable through dealer channels in ten configurations from $38,800 to $66,300, keeping the G1's manipulation stack on a lifting-column base: fixed-station in the Standard configurations and wheeled-chassis in the Ultimates, for data collection and environments where bipedal locomotion isn't needed. Request a G1-D quote →
G1 Still Working the Floor at Tokyo Haneda Airport
The G1 remains deployed for baggage and cargo handling at Tokyo Haneda Airport in partnership with Japan Airlines and GMO Internet Group — the first commercial airport deployment of a humanoid robot anywhere. Trial operations run through 2028 with ongoing evaluation of autonomous logistics workflows, giving institutional buyers a rare public reference deployment for the platform.
BotInfo Field Notes — Hands-On G1 Observations
Candid operator observations from the BotInfo.ai research team. Based on multiple in-person sessions with the Unitree G1 Basic at an authorized dealer's office and outdoor facility — not a sponsored review.
First Impression: Watching It Stand Up
The first time I saw a G1 in person was at a dealer investor event. It was lying flat on the floor — powered off, motionless. The demo engineer flipped the power switch on its side, and within about two minutes, the G1 came to life. It arched upward from the floor, legs pressing against the ground, knees straightening, torso curling up, head following last — a smooth, unfolding motion that looked straight out of a sci-fi film. I remember saying out loud, "Frankenstein coming to life!" The room was buzzing, but that wake-up sequence genuinely made people stop and watch.
Standing next to it, the G1 is about 4 feet tall — the size of a human child. The photos and videos don't convey that well. You expect a humanoid robot to be imposing; the G1 is actually approachable. You could put this in a university lobby or a conference booth and people would walk up to it, not away from it.
The Macarena: What "Pre-Trained Policies" Actually Look Like
At that same event, the engineer stood behind the G1, grabbed both arms by the biceps, and physically moved them through the Macarena arm pattern a few times — essentially puppeting it to reinforce the pre-programmed dance policy. Then he switched to the remote control and triggered the routine. The G1 started rotating its torso left and right, extending and curling its arms through the upper-body dance moves. I danced alongside it while the sales team recorded us and the crowd cheered.
Here's what I noticed: the dance was upper body only. No leg movements, no footwork, no hip rotation — just torso and arms. The robot I was dancing with was a Basic model (no SDK), running a pre-loaded policy that Unitree ships via cloud updates. And even that limited routine had to be physically demonstrated to it first by the engineer before it would perform reliably.
The Parking Lot: What Happened When It Ran
A few weeks later, I visited the same dealer's office on a Saturday morning. A marketing team member walked the G1 outside, crossed the street to the sidewalk with the remote control, and commanded it to run toward me. It started jogging — and then veered left, stepping off the sidewalk into the dirt shoulder between the walkway and the parking lot. No collision, but it clearly couldn't maintain a straight line.
She reset it, and we tried again — this time jogging together in the parking lot. After about 15 yards, the G1 veered left again and ran into me. It wasn't a hard hit — I played it off on camera by stopping, catching my breath, and asking it if it wanted to keep going. She commanded it to raise its right arm in a "come on!" wave gesture, and we continued. It made for a fun video moment, but the takeaway was clear: the G1's autonomous locomotion, even on flat pavement, drifts noticeably. It doesn't track straight lines reliably without correction.
What the Spec Sheet Doesn't Tell You
After spending time with the G1 across multiple sessions, here's what I'd want any buyer to know — especially if you're writing a purchase justification or grant proposal:
The marketing videos are aspirational, not operational. The backflips, martial arts sequences, and complex dance routines you see on Unitree's social media are produced under controlled lab conditions with specialized firmware and extensive data training. They do not represent out-of-the-box capabilities for any G1 you can buy today. The dealer's sales team confirmed this directly — those videos are pre-recorded marketing productions.
The Basic model is a demo unit, full stop. No programming, no custom policies, no SDK. It walks, it does pre-loaded gestures, and that's it. If your use case involves anything beyond showing it to people, you need an EDU configuration at minimum.
Locomotion drifts on flat ground. Even on smooth pavement, the G1 doesn't maintain a perfectly straight trajectory. For lab use with defined paths or tethered operation, this is manageable. For any application requiring precise autonomous navigation, you'll need to build that layer yourself on the EDU SDK.
It's genuinely impressive up close anyway. Despite all the caveats, watching a bipedal robot that costs less than a used car stand itself up from the floor, jog across a parking lot, and wave at you is still remarkable. The hardware quality is real. The potential is real. Just calibrate your expectations against the marketing.
More candid behind-the-scenes content with the G1 on the BotInfo YouTube channel →
Who Should Buy the Unitree G1?
Buy the G1 Basic ($17,990) if you:
- ✓ Want a humanoid robot for demonstrations, exhibitions, trade shows, or marketing displays
- ✓ Need a visually impressive showpiece for a robotics lab, showroom, or corporate lobby
- ✓ Are evaluating whether humanoid robots fit your organization's future plans
- ✓ Have no need for SDK access or custom programming
Buy the G1 EDU (any configuration, $43,900+) if you:
- ✓ Are a university, research institution, or corporate R&D team studying humanoid locomotion, manipulation, or embodied AI
- ✓ Need to develop and deploy custom AI models on real humanoid hardware
- ✓ Require SDK access, ROS2 integration, Isaac Sim or MuJoCo simulation pipelines, and full sensor data streaming
- ✓ Are writing a grant proposal mentioning "dexterous manipulation" or "grasping" (budget for Pro minimum at $51,900+)
- ✓ Need UnifoLM-VLA-0 deployment capability
Don't buy a G1 if you:
- ✕ Need a robot for sustained physical labor or heavy industrial tasks (2–3 kg arm payload limits this)
- ✕ Require outdoor all-terrain operation or weather resistance (no IP rating; indoor use recommended)
- ✕ Need a robot that can work at standard human workbench/counter heights (127 cm height limits practical task reach)
- ✕ Expect human-level dexterity and full autonomy today
- ✕ Are in a jurisdiction with restrictions on Chinese robotics imports
Before you lock your budget: the G1's real cost
A quoted humanoid robot can reach 2.5×–2.7× its sticker price once import duty, federal entry fees, freight, customs brokerage, engineer integration time, compute, spare batteries and multi-year maintenance are counted. Most institutional budgets miss these lines — and the gap routinely exceeds the price of the robot itself.
The BotInfo Humanoid Robot TCO Calculator turns any robot quote into a defensible landed cost, Year 1 total and 3-year total cost of ownership.
- ✓ Every cost line institutional buyers forget — pre-built with researched 2026 figures
- ✓ The engineer-integration line industry insiders call "the cost nobody writes down"
- ✓ A guided import-duty section — how to find your real HTS code and Section 301 rate
- ✓ Low / likely / high scenario tab so you can budget a defensible range
- ✓ Works for any humanoid robot — swap in your own quote and it recalculates instantly
Excel / Google Sheets compatible. A budgeting aid, not customs, legal or financial advice — verify figures with a licensed customs broker.
Frequently Asked Questions
How much does the Unitree G1 cost in 2026?
What's the best humanoid robot to buy in 2026?
Where can I buy a Unitree G1 right now?
Is the Unitree G1 in stock?
How should I plan lead times against a budget cycle?
What's the difference between G1 Basic and G1 EDU?
Which G1 EDU configuration should I buy?
What do the U-codes (U1–U14) mean?
Can I get a discount on the Unitree G1?
Can I get NET-30 terms or pay by purchase order?
Can I buy a G1 internationally?
Should I buy the G1 or the cheaper Unitree R1?
What is the Unitree G1-D?
Is Unitree financially stable?
Ordering Multiple Units or Need PO Billing?
For volume orders, purchase orders, NET-30 terms, sole-source documentation, quotes on the Pro / Comp / Boxing editions or the new tendon-cable configs, G1-D quotes, or international landed-cost estimates — BotInfo responds within 24 hours.




